AutoSar-Apollo-ROS framework
autosar
https://www.autosar.org/ 上有非常多,非常详细的设计标准资料,autosar是业界十几年的技术积累很强大,这里只列几张high-level的图
阿波罗
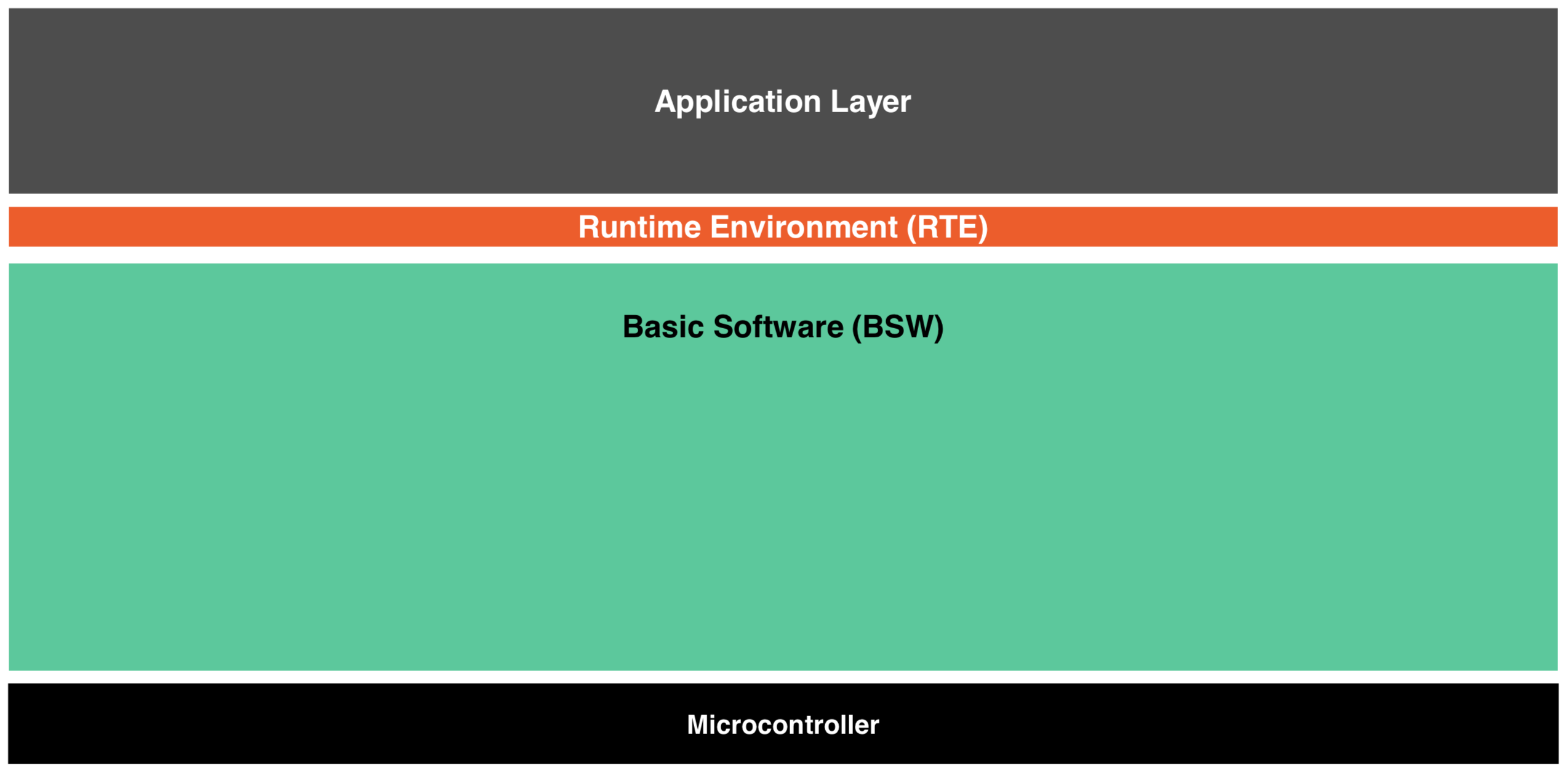
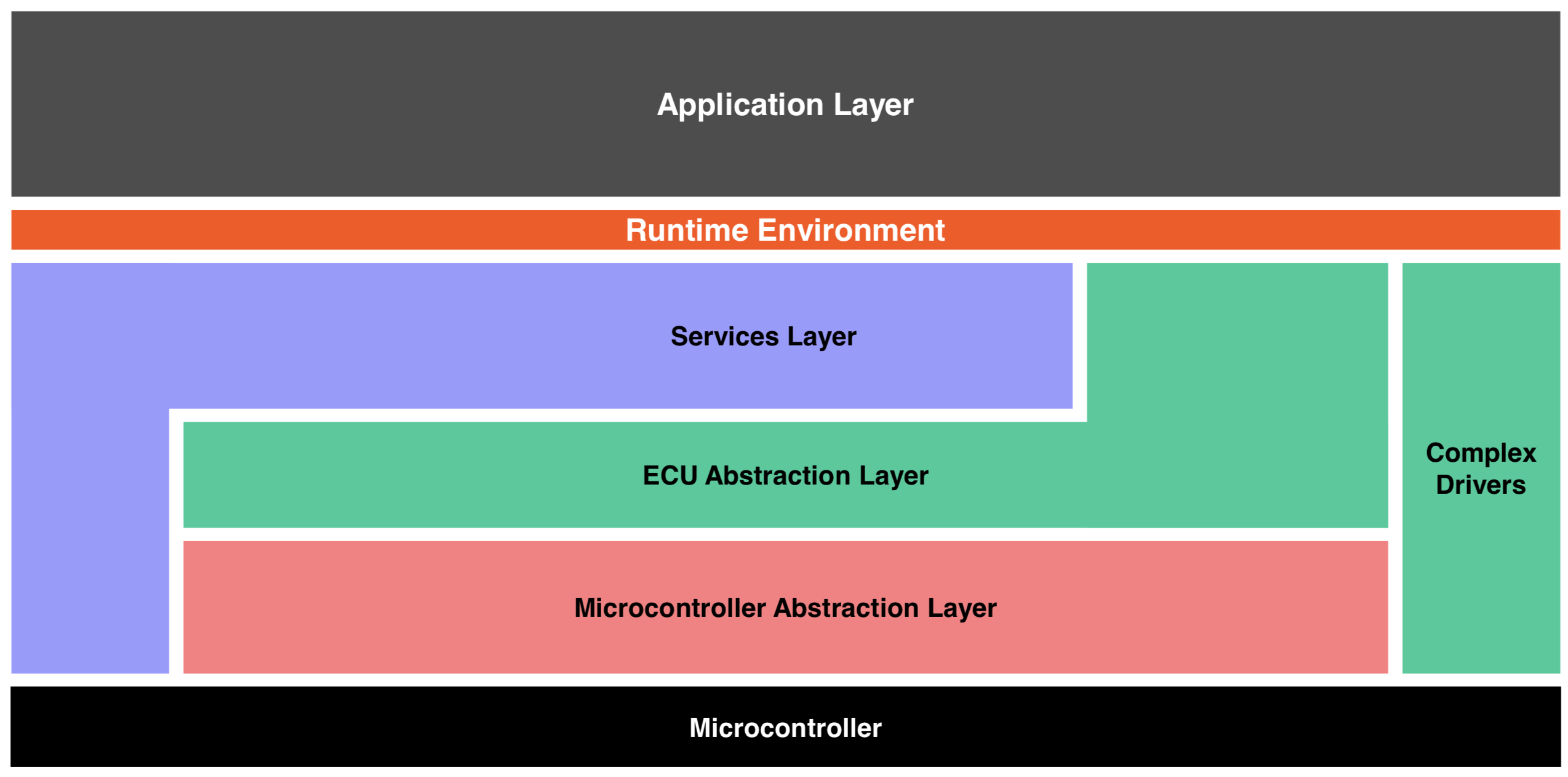
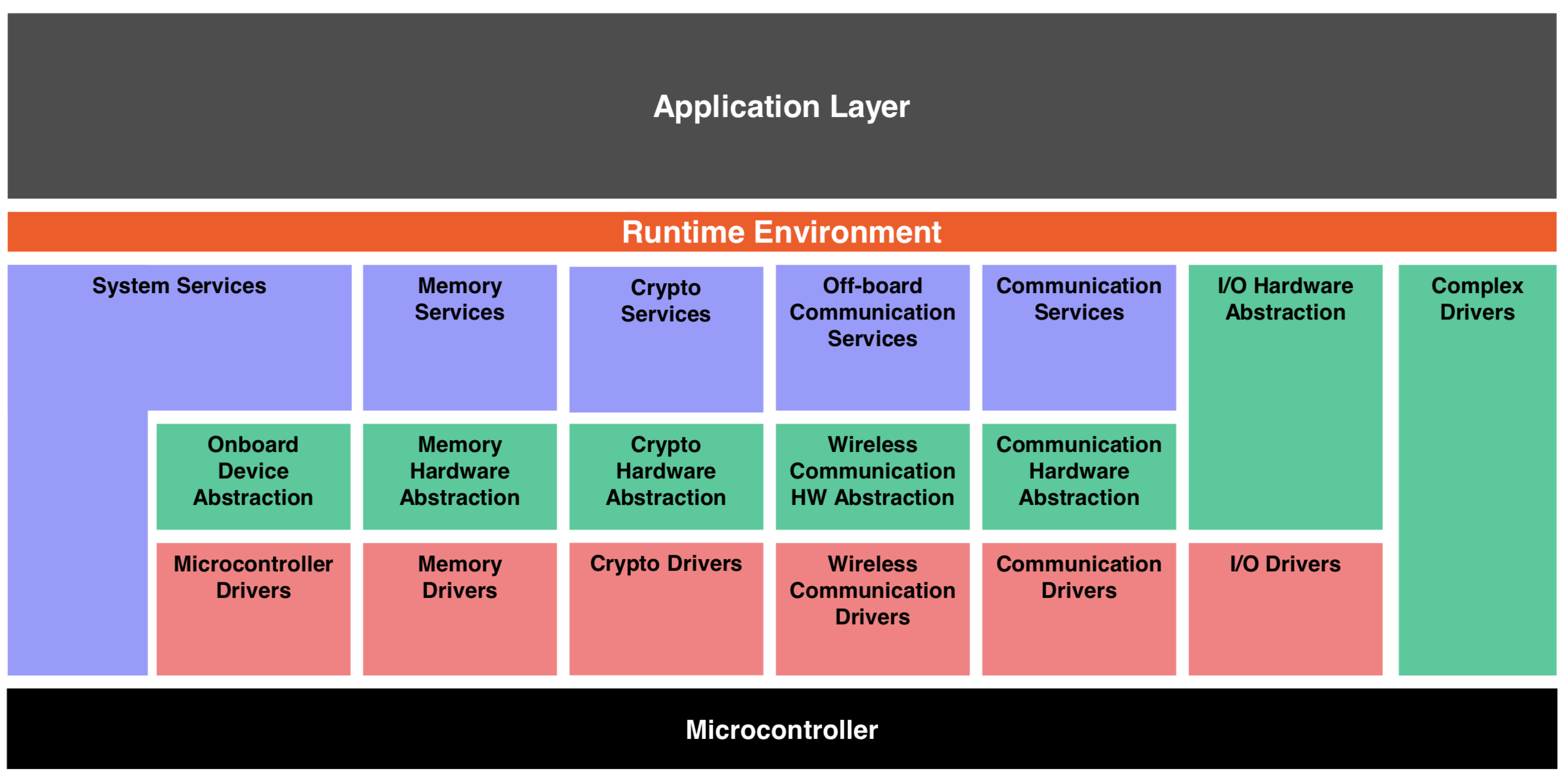
- 整体系统栈结构

- 硬件组件流图

- 软件组件流图

ROS
ros是:
- 通信层
- 生态:机器人各种功能组件集合体
- 系统:build system + launch system
- 工具包:模拟方案,图形化工具
ros2 基于的中间件
- protobuf
- zeromq
- WebSockets
- redis
- avahi(zeroconf)(服务发现)
- DDS (Data Distribution Service).

一些组件介绍
RTOS
- realtime linux
- 非常清楚的介绍: https://www.youtube.com/watch?v=BKkX9WASfpI
- realtime 强调的是determinism
- Preemption RT方案
- QNX
- micro-kernel架构
Runtime
职责(参考autosar):
- 管理运行时对象,以及他们的通信
- 资源隔离(cgroup、lxc、docker),防冲突(资源锁)
- 调度,基于实时OS的能力,设置优先级,抢占
- 协调系统进行多模式切换(如低电量,故障降级模式,高低精度模式)
- 错误记录、诊断、恢复
- 传感器校准
- 函数级的调用安全,系统级别的安全保证
- 能源管理(如自动根据需要打开关闭wifi)
- 全局时间同步
联系我: